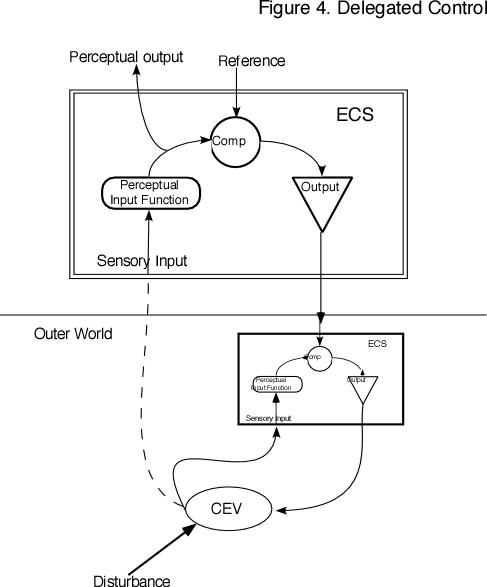
Figure 4 shows a control system accepting a reference signal from the ECS being helped. Instead of the original ECS continuing to perceive the CEV and to act on it, those tasks are passed off to an independent control system that takes as its reference a signal from the original one. So long as the helper control system is reliable, this kind of help can be effective. The original ECS may perceive the CEV, but only in an occasional monitoring role, to determine that the helper system continues to be reliable. Examples of this kind of control system might include:
A human could serve in this role, by accepting a provided reference as their own, but one has to remain aware that the human doing so could change at any moment, and is not necessarily sufficiently reliable to allow the original ECS to omit perceptual monitoring. However, human help is often applied in this way, as in "Would you mind holding this steady for me, while I ..." or "Helm, keep the ship steady at East-north-east."
The substitute controlsystem of Figure 4 is an example of a class of helper systems thatchange the dynamics and the uncertainties of the environment. It makes the CEV more predictable than it would otherwise be, and permits the original ECS to "command" the CEV rather than to "control" it. If the helper system is less than 100% reliable, the original one may have to continue to control, but at a much lower bandwidth and possibly gain than without the helper.
If the helper system of Figure 4 is inadequate as a controller, it could still be useful, but the original CEV would have to continue to control, as in Figure 5.
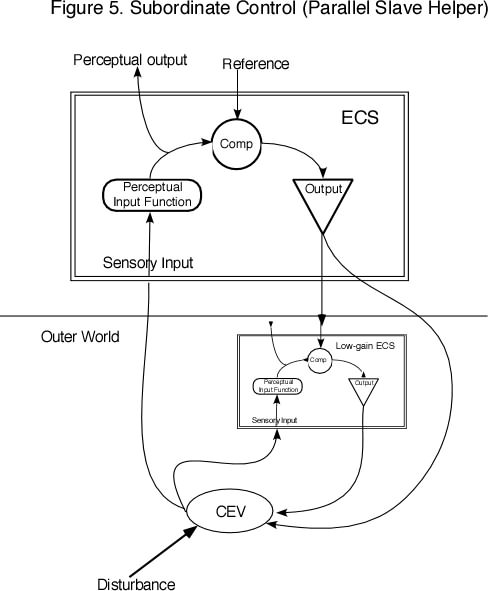
This situation might be called "parallel slave control." Parallel slave control can be helpful, if either the user or the helper is a low-gain system with a wide range of control compared to the other. But if they have comparable gains and control ranges, parallel control has a problem that is discussed under the next case (parallel autonomous control): the actions of each ECS affect the CEV that both perceive, and thus each contributes to the disturbance of the CEV as seen by the other. The "help" may be no help at all.
None of the foregoing configurations allow the helper to be an autonomous control system with its own set of reference levels, such as a human.
<--Previous | Main | Next-->