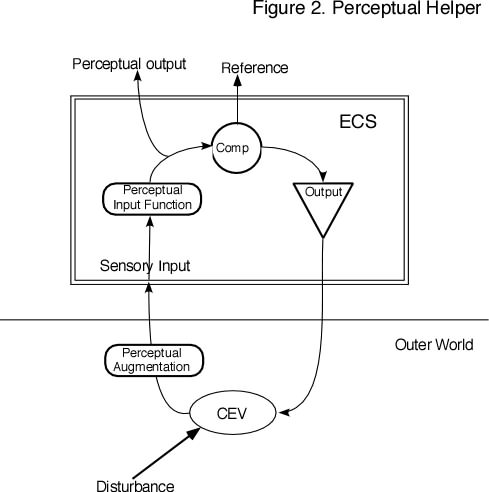
The second type of help is induced by a related problem, and also defines a class of tool. The speed and precision with which a control system can act to oppose the disturbance of the CEV depends on the speed and precision with which it can observe the state of the CEV and compare it with the reference state. A high-gain ECS with an imprecise perceptual function is likely to amplify noise, which is unlikely to move the CEV in such a way as to reduce the error. The imprecision of the perceptual function is reflected in an error that may even have the wrong sign if it is small. So long as the disturbance to the CEV is guaranteed to be slow, the precision of the perceptual function can be increased by gathering more and more information, but this does not work if the disturbance can push the CEV around rapidly. Under such circumstances, the perceptual function of the ECS needs to be both fast and accurate.
A second form of on-line help, therefore, is one that augments the speed
and precision of the perceptual function, as shown in Figure 2. Examples
include:
As with mechanical force amplifiers, perceptual augmenters may be considered
to be tools. Both force amplifiers and perceptual augmenters may be used
at the same time, as in microsurgery or war (Figure 3).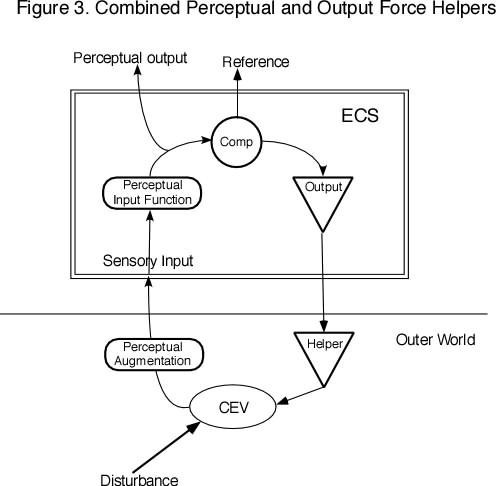
Tools are slave helpers. They simply change the properties of one or other part of the control loop of the ECS, in such a way that they could be seen as simply altering either the output or the input function of the ECS. All the other forms of help we shall consider involve other control systems of varying degrees of independence. (Some of the examples of tools actually involve other control systems, such as humans, but the control-system properties of those "tools" are irrelevant when they are acting in their capacity as tools).
<--Previous | Main | Next-->